
Related Content
News Detail
A Milestone Achievement in Soft Robotics by Zhejiang Lab and Zhejiang University: Self-powered Soft Robot in the Mariana Trench
Date: 2021-03-04
On
March 4, 2021, a latest achievement created by the joint research
team from Zhejiang Lab (ZJ Lab) and Zhejiang University (ZJU) was
published on Nature as a cover story entitled "Self-powered
Soft Robot in the Mariana Trench".
Focusing on bionic deep-sea soft robots, the research team enabled
the actuation of soft robots at ocean depths around 11,000 m and
completed the deep-sea free swimming demonstration at a depth of
3,224 m.
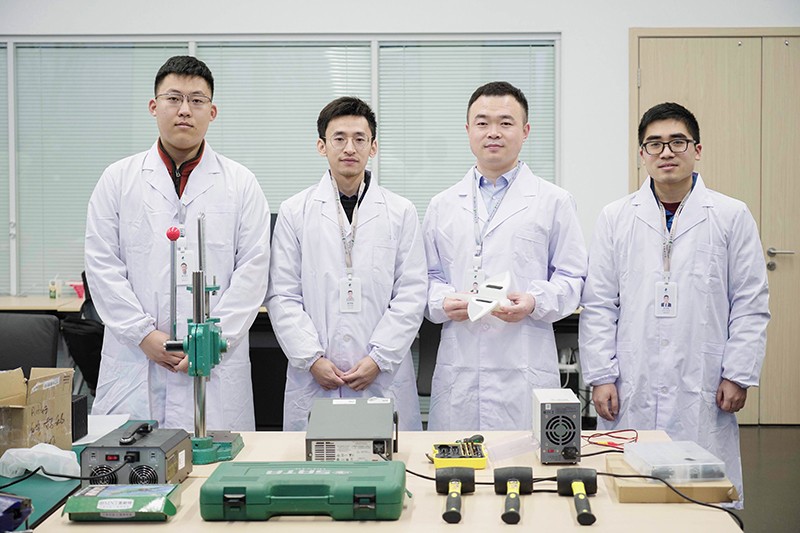
LI Guorui, a senior researcher at the Zhejiang Lab Intelligent Robotics Research Center is a first author of the paper (listed first). LIANG Yiming, an engineering specialist at the center, contributes to the work as a second author. The corresponding author is LI Tiefeng, a professor at Zhejiang University.
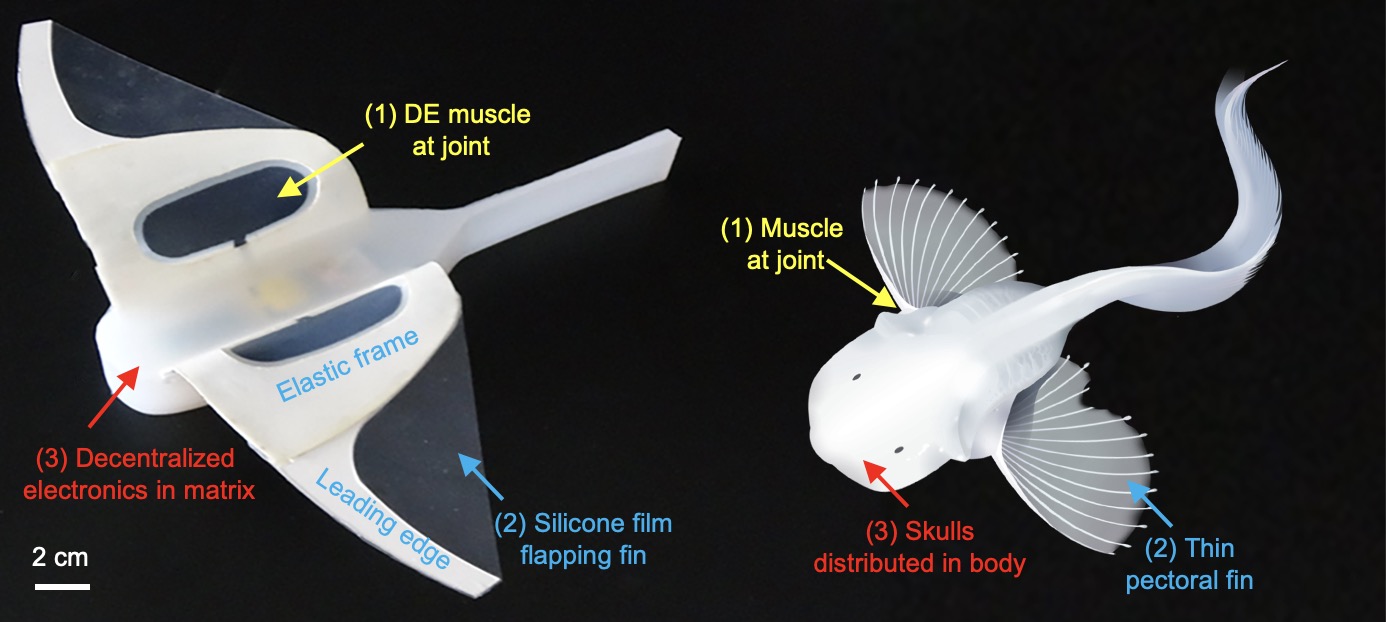
The deep sea remains the largest unknown territory on Earth because it is difficult to explore. Owing to high pressure in the deep sea, rigid vessels and pressure compensation systems are typically required to protect mechatronic systems. At the same time, deep sea creatures that lack bulky or heavy pressure-tolerant systems can thrive at extreme depths. With the body feature of a distributed skull and flapping pectoral fins, snailfish exhibits surprisingly high mobility and adaptability.
Inspired by the structure of snailfish, the team developed an untethered soft robot for deep-sea exploration with on-board power, control, and actuation by integrating decentralized electronics in a silicone matrix. The shape of fabricated bionic deep-sea soft robot is designed like a fish, which with a length of 22 cm and a wingspan of 28 cm, and a size of an A4 paper.
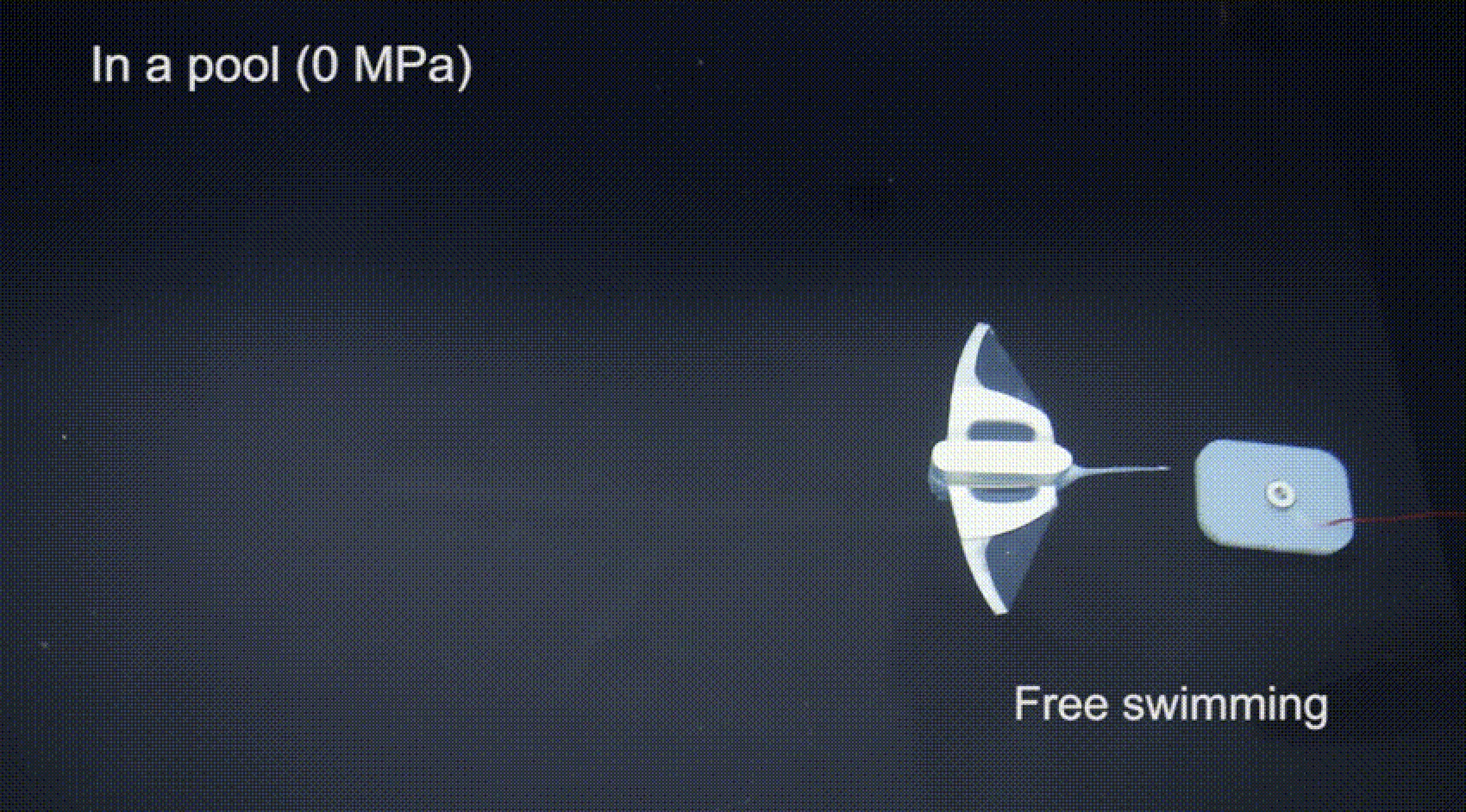
This self-powered robot succeeded in a field test at a depth of 10,900 m in the Mariana Trench, which demonstrated its excellent pressure resistance. In the absence of a pressure-tolerant vessel, flapping actuation was maintained for 45 minutes. In a field test in the South China Sea, this soft robot successfully free swam at a speed of 5.19 cm/s with its flapping locomotion at a depth of 3,224 m.
The robot has extensive prospects for applications in mechanically abusive surroundings such as deep-sea areas, polar regions, and high-impact environments. In the future, the team will focus on developing new materials and structures to enhance the intelligence, versatility, maneuverability, and efficiency of soft robots and devices. "This work highlights the potential of designing soft light-weight devices for use in extreme conditions," said LI Guorui.
For full text of the paper, please refer to https://www.nature.com/articles/s41586-020-03153-z.
SHARE










